|
|
| MOQ: | 1 |
| দাম: | US $3500.00 - 4900.00/ Set |
| স্ট্যান্ডার্ড প্যাকিং: | পিচবোর্ডের বাক্স/কাঠের ক্রেট |
| বিতরণ সময়কাল: | 6 ~ 8 সপ্তাহ |
| মূল্যপরিশোধ পদ্ধতি: | টি/টি |
| সরবরাহ ক্ষমতা: | প্রতি বছর 500 সেট |
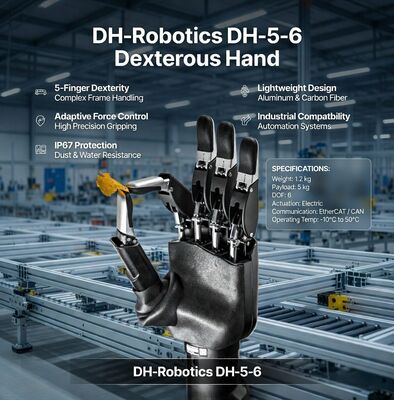
DH-Robotics DH-5-6 হল একটি ৫-আঙুলের টেন্ডন-চালিত দক্ষ রোবোটিক হাত যার ৬টি সক্রিয় ডিগ্রি অফ ফ্রিডম রয়েছে। এটি হিউম্যানয়েড রোবট, কোলাবোরেটিভ রোবট এবং গবেষণা প্ল্যাটফর্মের জন্য ডিজাইন করা হয়েছে যেগুলির জন্য মানুষের মতো গ্রিপিং, ফোর্স কন্ট্রোল এবং পারসেপশন প্রয়োজন। হাতটি ইন্টিগ্রেটেড মাইক্রো লিনিয়ার অ্যাকচুয়েটর ব্যবহার করে এবং সুনির্দিষ্ট ও কমপ্লায়েন্ট ম্যানিপুলেশনের জন্য হাইব্রিড পজিশন-ফোর্স কন্ট্রোল সমর্থন করে।
| প্যারামিটার | স্পেসিফিকেশন |
|---|---|
| আঙুল | ৫টি আঙুল (অ্যানথ্রোপোমরফিক) |
| সক্রিয় ডিগ্রি অফ ফ্রিডম | ৬ |
| মোট জয়েন্ট | ১২ |
| ড্রাইভ সিস্টেম | মাইক্রো লিনিয়ার অ্যাকচুয়েটর সহ টেন্ডন-চালিত |
| সেন্সিং | ফোর্স / ট্যাকটাইল সেন্সর |
| কন্ট্রোল মোড | পজিশন + ফোর্স হাইব্রিড কন্ট্রোল |
| যোগাযোগ | CAN / RS485 / EtherCAT |
| ওজন | প্রায় ৪০০–৫৫০ গ্রাম |
| আঙুলের গ্রিপিং ফোর্স | প্রতি আঙুলে ৫–১৫ N (সাধারণ) |
অনুগ্রহ করে সরবরাহ করুন:
|
|
| MOQ: | 1 |
| দাম: | US $3500.00 - 4900.00/ Set |
| স্ট্যান্ডার্ড প্যাকিং: | পিচবোর্ডের বাক্স/কাঠের ক্রেট |
| বিতরণ সময়কাল: | 6 ~ 8 সপ্তাহ |
| মূল্যপরিশোধ পদ্ধতি: | টি/টি |
| সরবরাহ ক্ষমতা: | প্রতি বছর 500 সেট |
DH-Robotics DH-5-6 হল একটি ৫-আঙুলের টেন্ডন-চালিত দক্ষ রোবোটিক হাত যার ৬টি সক্রিয় ডিগ্রি অফ ফ্রিডম রয়েছে। এটি হিউম্যানয়েড রোবট, কোলাবোরেটিভ রোবট এবং গবেষণা প্ল্যাটফর্মের জন্য ডিজাইন করা হয়েছে যেগুলির জন্য মানুষের মতো গ্রিপিং, ফোর্স কন্ট্রোল এবং পারসেপশন প্রয়োজন। হাতটি ইন্টিগ্রেটেড মাইক্রো লিনিয়ার অ্যাকচুয়েটর ব্যবহার করে এবং সুনির্দিষ্ট ও কমপ্লায়েন্ট ম্যানিপুলেশনের জন্য হাইব্রিড পজিশন-ফোর্স কন্ট্রোল সমর্থন করে।
| প্যারামিটার | স্পেসিফিকেশন |
|---|---|
| আঙুল | ৫টি আঙুল (অ্যানথ্রোপোমরফিক) |
| সক্রিয় ডিগ্রি অফ ফ্রিডম | ৬ |
| মোট জয়েন্ট | ১২ |
| ড্রাইভ সিস্টেম | মাইক্রো লিনিয়ার অ্যাকচুয়েটর সহ টেন্ডন-চালিত |
| সেন্সিং | ফোর্স / ট্যাকটাইল সেন্সর |
| কন্ট্রোল মোড | পজিশন + ফোর্স হাইব্রিড কন্ট্রোল |
| যোগাযোগ | CAN / RS485 / EtherCAT |
| ওজন | প্রায় ৪০০–৫৫০ গ্রাম |
| আঙুলের গ্রিপিং ফোর্স | প্রতি আঙুলে ৫–১৫ N (সাধারণ) |
অনুগ্রহ করে সরবরাহ করুন: